This design is an unmanned Mars rover system include a command rover and several small muti-task rovers. It makes use of the advantages of high efficiency, high flexibility and strong adaptability brought by innovative designs such as distributed mission layout, modular function package, multi-attitude transformation and so on, to solve or alleviate the questions from the existing Mars rovers, like high work risk and unstable energy acquisition. and adapt to the complex mission requirements of future Mars detection programs, so as to assist the possible manned missions to Mars in the 2030s to 2050s.
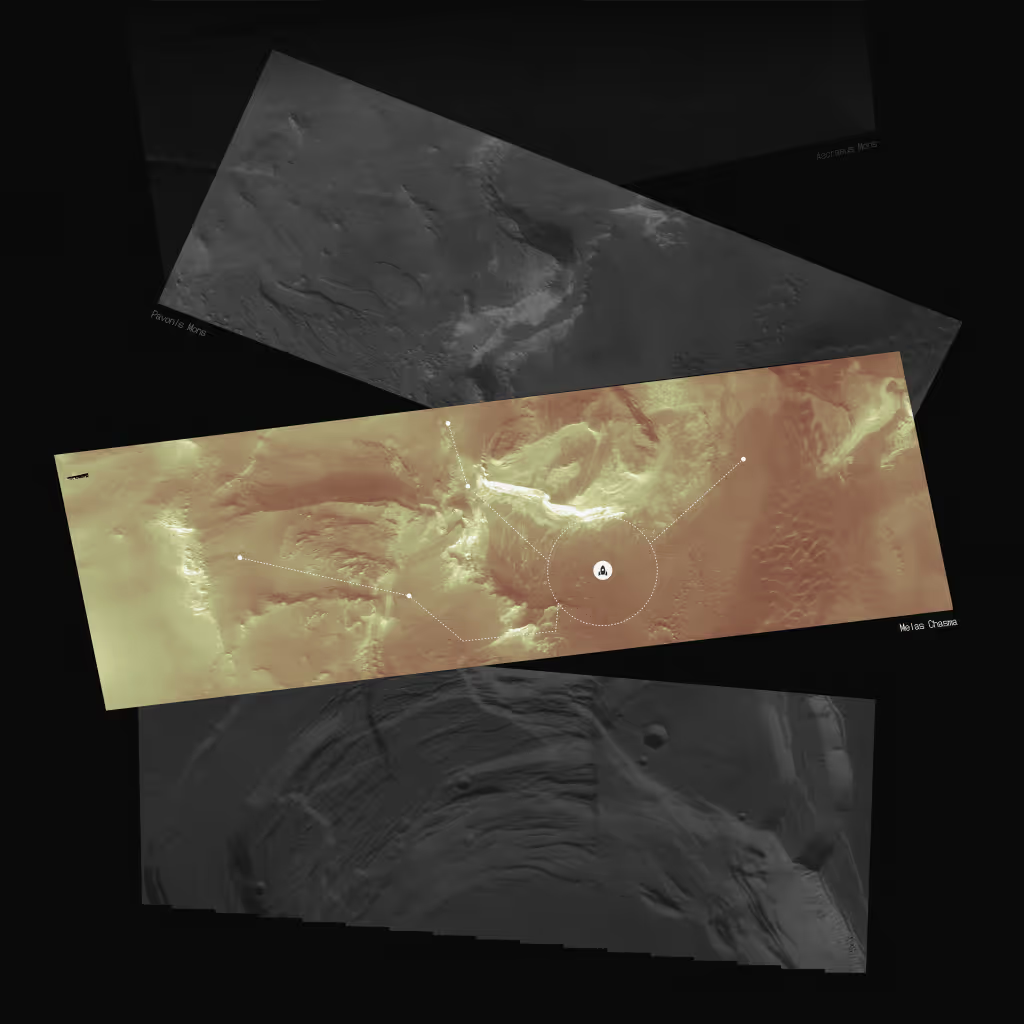
Around 2030, the Mars landing mission has been put on the agenda and planned for implementation. At the same time, humans plan to establish a long-term research base with human habitation on Mars.As a prerequisite for the Mars landing mission, the development of the Mars landing site and research base requires the establishment of a complete system of engineering, monitoring, and guarantee to ensure the smooth progress of the subsequent Mars landing mission.
Task #01
It can be responsible for a series of main tasks such as Mars surface development, establishment of information nodes, and peripheral monitoring, all of them are more complex than the nowadays mission.
Task #02
Envisage the supporting method of the rover which maintain its operation and dealing with unexpected situations.
Task #03
Design the working routine of the rover, from how it is deployed on Mars, to how it is put into operation.

For making the algae can growing in micro-gravity environment, a holistic, semi-solid structure is needed for fixing the algae and creating contact surface for algae to grow, by processing the sodium alginate with algae and nutrition inside, the new fixture can be printed into this kind of structure through vacuuming and extruding.
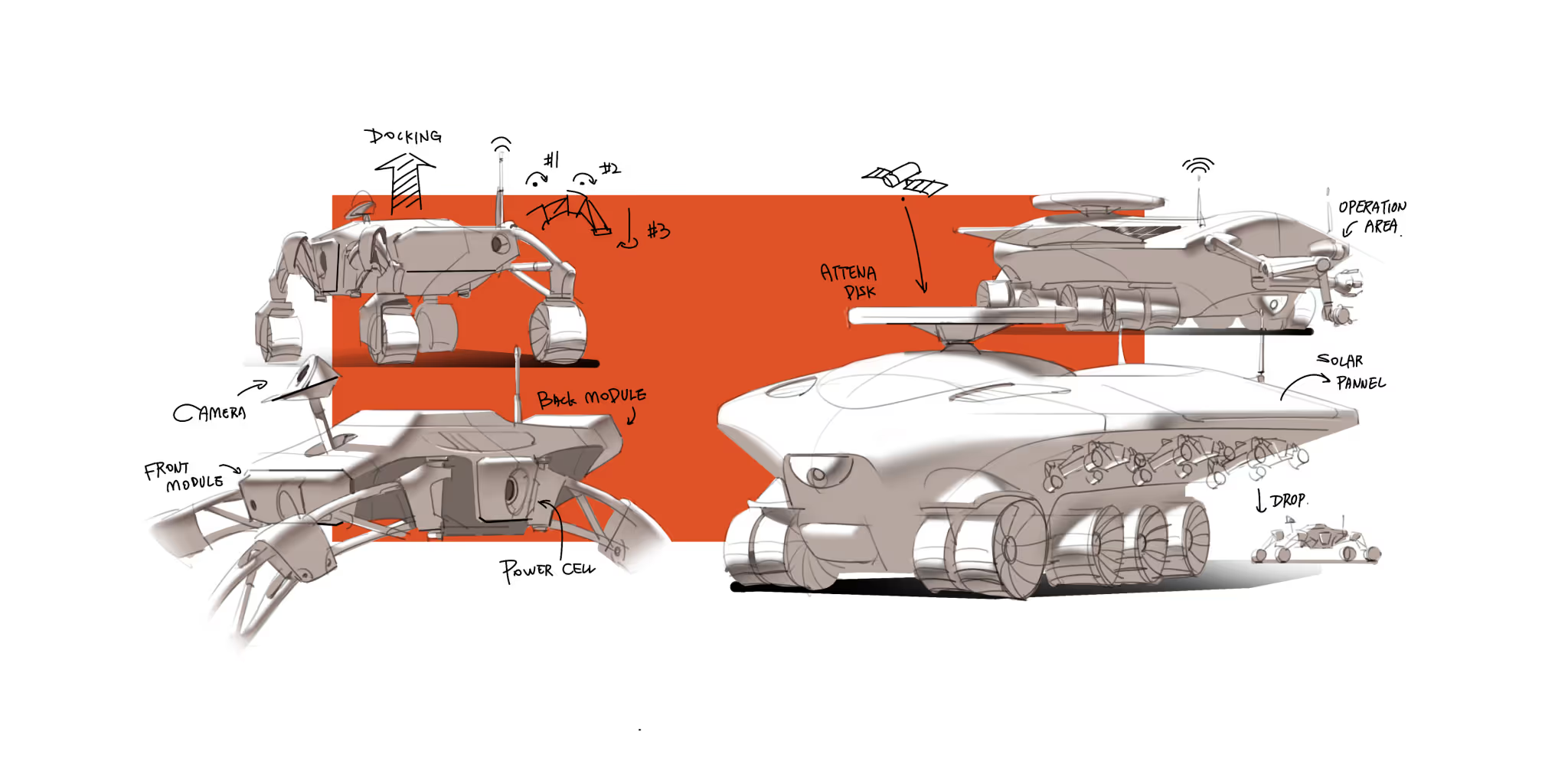
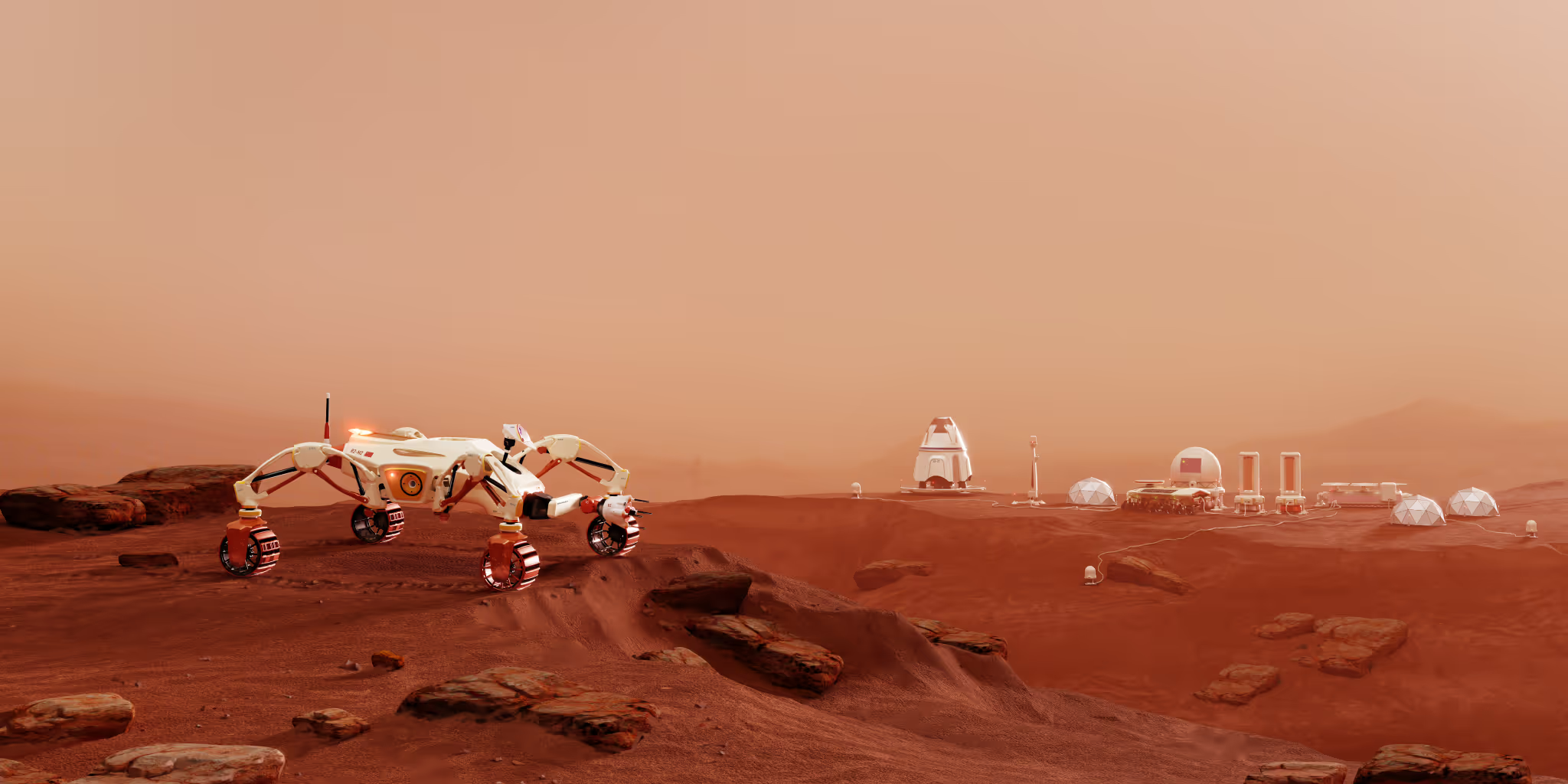
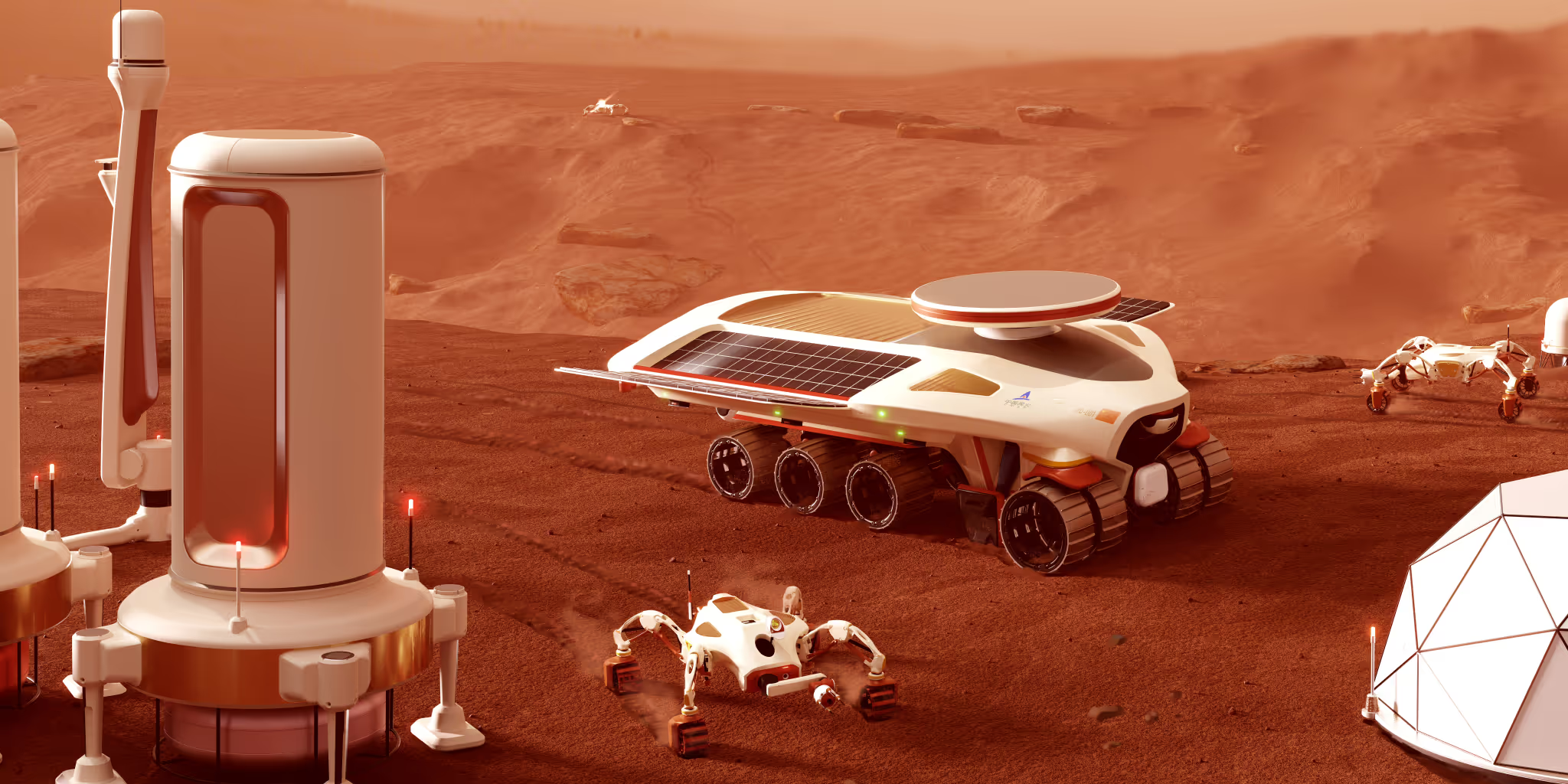
The command vehicle is designed to remain stationed near flat landing zone, it adopts a wheeled structure with a streamlined exterior, ensuring stability in Mars’ extreme climate conditions while maintaining high mobility.


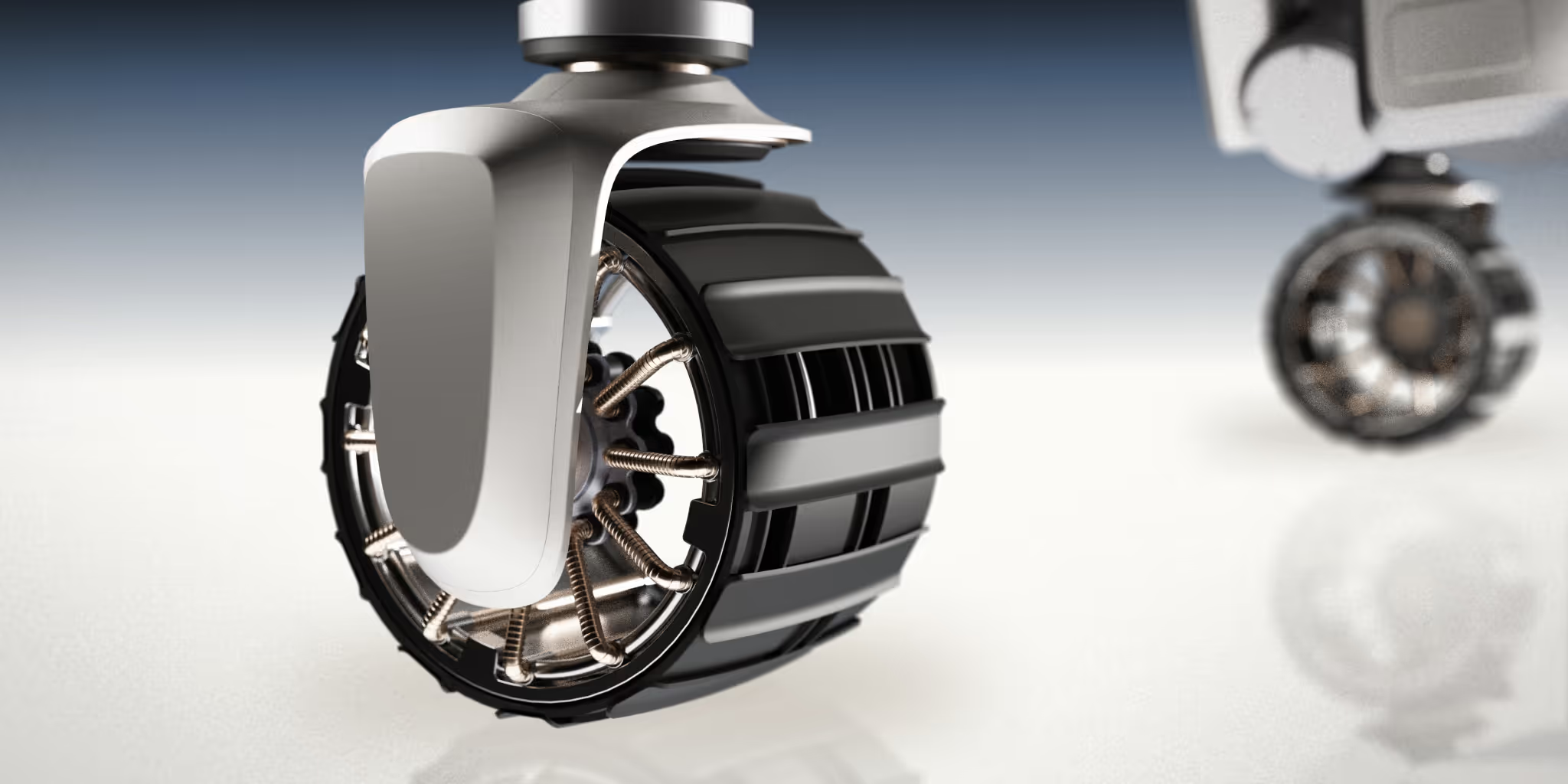
Small rover has a wide range of tasks, so its overall structure adopts an wheel-leg composite design. It combines the all-terrain adaptability and mobility of both multi-legged and wheeled robots. Additionally, it can adjust its posture to handle different mission requirements.

The command vehicle is designed to remain stationed near flat landing zone, it adopts a wheeled structure with a streamlined exterior, ensuring stability in Mars’ extreme climate conditions while maintaining high mobility.

The command vehicle adopts an integrated streamlined design to better adapt to extreme wind conditions on Mars. Its low-profile and flat body structure enhances driving stability in low-gravity and windy environments, while the expansive top surface enables the integration of larger antennas and solar panels. During launch and transport, the mother vehicle and rovers will be combined to optimize space efficiency.

To deploy the system, Rovers and landing vessel while take the rocket and move into the specific orbit of Mars, then be dropped to the Mars surface with landing pod and a sky crane.